1. どんなもの?
- One Class Learningの枠組み
- side-informationを必要とせず,representation collapseに対してrobust
- negative examples を用いたDROCC-LN(Limeted Negatives)も提案
2. 先行研究と比べてどこがすごい?
- GEOM系は画像などのtransformに対して事前知識が必要(汎用性もない)
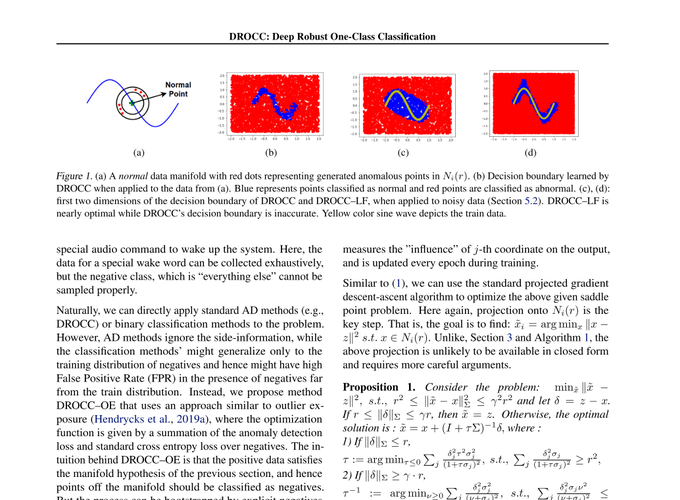
- DeepSVDDは全てが同じ特徴に落ちてしまうrepresentation collapseが問題
3. 技術や手法の"キモ"はどこ?
仮定:
The set of typical points $S$ lies on a low dimensional locally linear manifold that is well-sampled. In other words, outside a small radius around a training (typical) point, most points are anomalous.
正常 $S$ は低次元な局所的線形多様体上に存在し,よくsamplingされている.言い換えるとtrainingデータの周りの小さな半径の外側が異常である.

DROCC
- 入力データをNNで次元を落として正常ベクトル$f_\theta(x)$とその外側ベクトル$f_\theta(\tilde{x})$を生成
- $f_\theta(\tilde{x})$を生成するのに敵対的枠組みを利用
- $l$はcrossentropyとして正常1・外側0として分類タスクに持っていく
$$ \ell^{\mathrm{dr}}(\theta)=\lambda|\theta|^{2}+\sum_{i=1}^{n}\left[\ell\left(f_{\theta}\left(x_{i}\right), 1\right)+\mu \max _ {\tilde{x} _ {i} \in} \ell\left(f_{\theta}\left(\tilde{x}_{i}\right),-1\right)\right] $$
$$
N_{i}(r) \stackrel{\text { def }}{=} \{ | \tilde{x_i} - x_i |_2 \leq \gamma \cdot r; r \leq | \tilde{x_i} - x_i |, \forall j=1,2, \ldots n\}
$$

DROCC-LN
- DROCCにラベルを付与(Outlier Exposureの枠組み)
- 距離を測るときに↑のようにユークリッドではなくマハラノビスで $| \tilde{x_i} - x_i | _ \Sigma$
$$ \ell^{\mathrm{lf}}(\theta)=\lambda|\theta|^{2}+\sum_{i=1}^{n}\left[\ell\left(f_{\theta}\left(x_{i}\right), y_i\right)+\mu \max _ {\tilde{x} _ {i} \in} \ell\left(f_{\theta}\left(\tilde{x}_{i}\right),-1\right)\right] $$
$$ N_{i}(r) \coloneqq \{ \tilde{x_i}, r \leq | \tilde{x_i} - x_i | _ \Sigma \leq \gamma \ldots r \} $$
4. どうやって有効だと検証した?
-
Cifar10で実験

-
Imagenetで実験

-
音声データを使ってDeepSADと比較

5. 議論はあるか?
- 正常の外側をselfで作るself-supervisedの枠組みといっていい?
- MVTec ADでの実験が欲しかった
- 公式実装あり github